|
|
His motivation and goals:
Dr. Brooks seems to be very interested in building robots that can interact in the human world.
Towards this end he has built "safe" robots that can learn to interact with their environment.
All of his recent academic projects have involved an infant-type robot that requires a caregiver to teach it how to interact.
The "expression" of emotion via robot posture is aimed at optimizing the human-to-robot interface.
Dr. Brooks takes a modular approach to motors and sensors - eyes send filtered images to the various processing modules
Currently involved with:
MIT Living Machines group -- A group Dr. Brooks seems to be invoved with but not listed as working on the projects
Humanoid Robotics Group -- The apparent main meat and potatoes of Dr. Brooks' work.
iRobot -- Dr. Brooks new cash cow
Humanoid Robotics Group:
Coco: a small ape-like robot built on a MPI cluster , 15 degrees of freedom

 video of Coco
video of Coco
Kismet: an expressive face robot built on a inhomogenous OS network on variety of protocols, 3 degrees of freedom for eyes and 3 for neck

 video of Kismet
video of Kismet
Cog: networked computers running QNX 4.25 real-time OS, twenty-two mechanical degrees-of-freedom

 video of Cog
video of Cog
Macaco: robotic dog-head, joint project between the Dr. Brooks' group and the MIT Leg Lab

iRobot:
Roomba: robotic floorvac


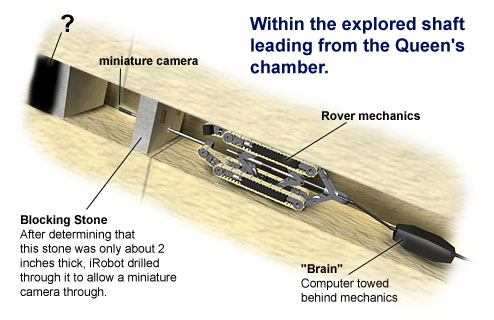
Pyramid Rover: exploratory robot

PackBot: military recon robot
|
|
